Эта рука робота может отсоединяться и ползать: эффективнее, чем человеческая (видео)
Инженеры из Швейцарии создали отсоединяемую, похожую на паука роботизированную руку, способную захватывать различные предметы и использовать пальцы для ползания.
Ученые создали роботизированный манипулятор, у которого рука может отсоединяться от основной конструкции, перемещаться к предметам и переносить их. Симметричная конструкция и гибкие пальцы руки позволяют роботу переносить предметы с обеих сторон. Для человека это выглядело бы как держать мяч в ладони, одновременно захватывая фрукт тыльной стороной ладони. Но разработчики роботизированной руки из Швейцарии говорят, что это пример конструкции, которая эффективнее человеческой руки. Новая технология описана в журнале Nature Communications, пишет Popular Science.
У Фокус. Технологии появился свой Telegram-канал. Подписывайтесь, чтобы не пропускать самые свежие и захватывающие новости из мира науки!
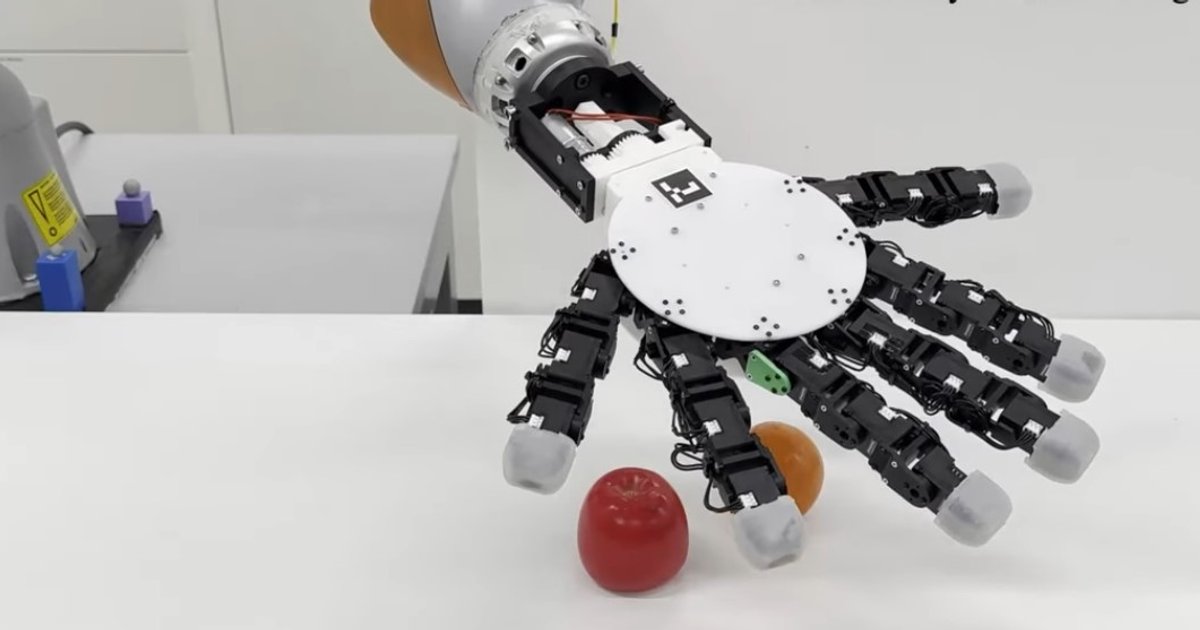
В видеоролике показано, как роботизированная рука, все еще прикрепленная к манипулятору, поднимает бутылку с горчицей, а затем переворачивается и хватает банку чипсов противоположной стороной ладони. В другом примере рука легко поднимает помидор двумя пальцами, удерживая второй предмет между пальцами с противоположной стороны. Затем рука отсоединяется от манипулятора и быстро движется к банану, переворачивает его вверх и закрепляет на тыльной стороне ладони одним пальцем.
По словам инженеров, полностью симметричная конструкция роботизированной руки позволяет ее четырем пальцам и двум большим пальцам двигаться с одинаковой гибкостью как вперед, так и назад. Рука может одновременно удерживать до трех разных предметов общим весом около двух килограммов. Благодаря увеличенному диапазону движений, робот способен воспроизводить 33 различных типа движений захвата, характерных для руки человека.
Хотя конструкция призвана компенсировать биологические ограничения человеческой руки, она также черпает вдохновение у животных. Ученые указывают на осьминогов и некоторых насекомых, которые используют свои пальцеобразные конечности для передвижения и одновременного манипулирования объектами в окружающей среде.
Для создания роботизированной руки инженеры начали с создания цифровой библиотеки положений захвата человеческой руки. Затем они использовали компьютерный алгоритм для определения оптимального уровня движения и количества пальцев, чтобы решить задачи как захвата, так и перемещения.
Интересно, что наличие большего количества пальцев на руке — это не всегда лучше. Каждый дополнительный палец увеличивает массу, повышая вероятность столкновения пальцев и делая движение в целом более неуклюжим. Ученые обнаружили, что увеличение количества пальцев до шести повышает эффективность ползания руки, но добавление большего количества пальцев приводит к снижению эффективности.
Такой подход к проектированию роботов противоречит растущей тенденции к созданию человекоподобных роботов. Крупные технологические компании вкладывают значительные средства в создание рук, которые имитируют конструкцию человеческой руки. Основная идея заключается в том, что проектирование роботов, функционирующих подобно людям, позволяет им выполнять задачи, которые уже выполняют люди. Но новая роботизированная рука использует другой подход.
Хотя пока неясно, будет ли эта конструкция реализована в других роботах, можно представить себе человекоподобного робота, использующего отсоединяемую руку для выполнения задач на производстве, чтобы, например, дотянуться до удаленных объектов и перенести их.
Как уже писал Фокус, органы, распечатанные на 3D-биопринтерах, космический лифт и роботы-помощники — звучит как научная фантастика в 2026 году, но ученые считают, что все это станет реальностью к 2050 году.