Почти как человеческая. Ученые создали умную искусственную мышцу для роботов-гуманоидов
Исследователи из Южной Кореи создали искусственную мышцу, которая может одновременно двигаться, определять силу и отслеживать собственное растяжение без отдельных датчиков. Разработка может сделать роботов более похожими на людей в движении и реакциях.
Об этом пишет издание Interesting Engineering.
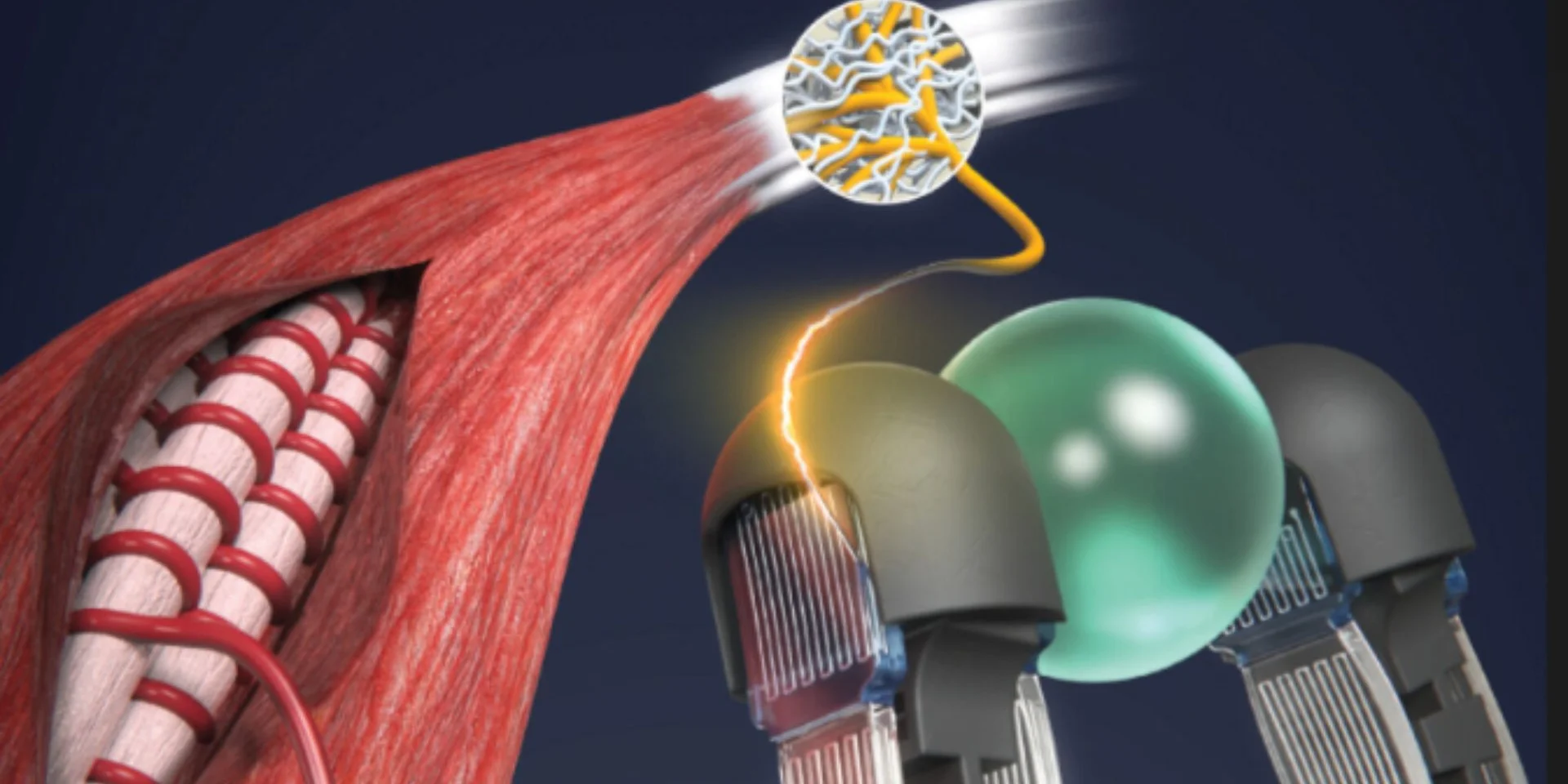
Команда ученых создала устройство на основе редкометаллических каналов, встроенных в специальный эластичный материал. Искусственная мышца сокращается под действием электричества и одновременно измеряет силу и длину в реальном времени.
Исследователи считают, что эта технология может помочь в создании нового поколения роботов-гуманоидов с более естественными движениями и способностью лучше реагировать на окружающую среду.
Спрос на роботов, которые могут двигаться и взаимодействовать с людьми более естественно, постоянно растет. Такие системы могут использоваться в логистике, медицине, реабилитации и робототехнике. В то же время обычные искусственные мышцы имеют ограничения, поскольку для движения и сенсорики им нужны отдельные системы контроля и дополнительные датчики.
Чтобы решить эту проблему, инженеры создали систему, вдохновленную человеческими мышцами и сухожилиями. Она сочетает функции движения и сенсорики в одной конструкции. Внутри искусственной мышцы расположены два канала с жидким металлом: один отвечает за сокращение из-за нагрева, а другой работает как сенсор и отслеживает силу и деформацию.
Во время экспериментов исследователи создали роботизированные пальцы и захваты, которые могли осторожно брать предметы и самостоятельно определять их жесткость и размер. Две искусственные мышцы работали вместе, как в человеческом теле, что позволило сделать движения более быстрыми и точными.
Система также может контролировать собственное состояние без внешних сенсоров. Это дает роботам возможность более естественно реагировать на изменение силы или контакт с предметами. Во время тестов искусственные мышцы помогли уменьшить ошибки управления движениями роботизированных пальцев.
В то же время исследователи отметили, что технология еще нуждается в совершенствовании. Во время длительной работы внутри мышцы накапливается тепло, из-за чего снижается точность. Также резкие изменения движения могут вызвать ошибки в работе системы.
Для решения этих проблем команда предложила использовать более быстрые методы охлаждения, в частности более тонкие материалы, специальные каналы для охлаждения или системы на базе модулей Пельтье. В будущем исследователи планируют улучшить модели оценки растяжения и изучить распределение тепла в материале, чтобы сделать искусственные мышцы еще более точными и надежными.